



| Step Angle (°) | Motor length (mm) | Holding torque (g*cm) | Current /phase (A/phase) |
Resistance (Ω/phase) | Inductance (mH/phase) | No. of leads | Rotational inertia (g*cm2) | Weight (KG) |
| 0.9 | 41 | 3.9 | 1 | 5.7 | 0.7 | 6 | 120 | 0.45 |
| 1.8 | 41 | 3.9 | 2 | 1.4 | 1.4 | 8 | 150 | 0.47 |
| 0.9 | 51 | 7.2 | 2 | 1.6 | 2.2 | 6 | 280 | 0.59 |
| 1.8 | 51 | 3009 | 2 | 1.8 | 2.7 | 8 | 230 | 0.59 |
| 0.9 | 56 | 12 | 2.8 | 0.9 | 3.3 | 4 | 300 | 0.7 |
| 1.8 | 56 | 9 | 2 | 1.8 | 2.5 | 6 | 280 | 0.68 |
| 0.9 | 76 | 18 | 2.8 | 1.15 | 5.6 | 4 | 480 | 1 |
| 1.8 | 76 | 13.5 | 3 | 1 | 1.6 | 6 | 440 | 1.1 |
| 1.8 | 100 | 30 | 4.2 | 0.75 | 3 | 4 | 700 | 1.3 |
| 1.8 | 112 | 31 | 4.2 | 0.9 | 3.8 | 4 | 800 | 1.4 |

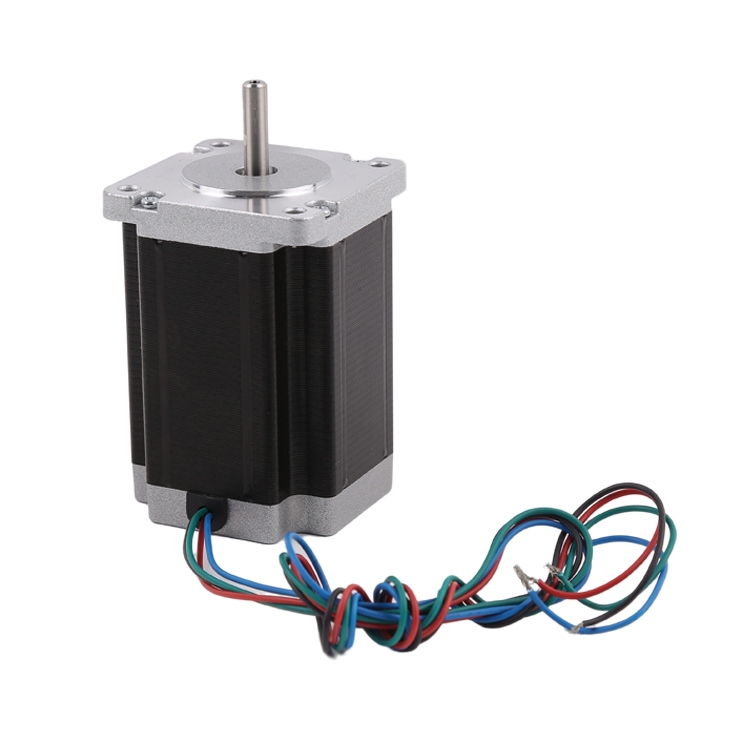
 Customers should follow the principle of “selecting stepper motors first, then select driver based on existing stepper motor” It is best not to use the full-step driving mode to drive a hybrid stepping motor, and the vibration is bigger under full-step driving. Hybrid stepper motor is more suitable for low-speed occasions. We suggest the speed does not exceed 1000 rpm (6666PPS at 0.9 degrees), preferably between 1000-3000PPS (0.9 degrees), and it can be attached with a gearbox to lower it’s speed. The motor has high working efficiency and low noise at suitable frequency. Due to historical reasons, only the motor with a nominal 12V voltage uses 12V. Other rated voltage on design drawing is not exactly the most suitable driving voltage for the motor. Customers should choose suitable driving voltage and suitable driver based on own requirement. When the motor is used with high speed or large load, it generally does not start at the working speed directly. We suggest to gradually increases the frequency and speed. For two reasons: First, the motor does not lose steps, and second, it can reduce noise and improve the positioning accuracy. The motor should not work in the vibration area(below 600 PPS ). If it must be used at slow speed, vibration problem could be reduced by changing the voltage, current or adding some damping. When the motor works below 600PPS (0.9 degrees), it should be driven by small current, large inductance and low voltage. For loads with a large moment of inertia, a large size motor should be selected. When higher precision is required, it could be solved by adding gearbox, increasing the motor speed, or using subdivision driving. Also a 5-phase motor(unipolar motor) could be used, but the price of the entire system is relatively expensive, so it’s rarely used. Stepper motor size: We currently have 20mm(NEMA8), 28mm(NEMA11), 35mm(NEMA14), 42mm(NEMA17), 57mm(NEMA23), 86mm(NEMA34) hybrid stepper motors. We suggest to determine motor size first, then confirm other parameter, when you select a hybrid stepper motor.
Customers should follow the principle of “selecting stepper motors first, then select driver based on existing stepper motor” It is best not to use the full-step driving mode to drive a hybrid stepping motor, and the vibration is bigger under full-step driving. Hybrid stepper motor is more suitable for low-speed occasions. We suggest the speed does not exceed 1000 rpm (6666PPS at 0.9 degrees), preferably between 1000-3000PPS (0.9 degrees), and it can be attached with a gearbox to lower it’s speed. The motor has high working efficiency and low noise at suitable frequency. Due to historical reasons, only the motor with a nominal 12V voltage uses 12V. Other rated voltage on design drawing is not exactly the most suitable driving voltage for the motor. Customers should choose suitable driving voltage and suitable driver based on own requirement. When the motor is used with high speed or large load, it generally does not start at the working speed directly. We suggest to gradually increases the frequency and speed. For two reasons: First, the motor does not lose steps, and second, it can reduce noise and improve the positioning accuracy. The motor should not work in the vibration area(below 600 PPS ). If it must be used at slow speed, vibration problem could be reduced by changing the voltage, current or adding some damping. When the motor works below 600PPS (0.9 degrees), it should be driven by small current, large inductance and low voltage. For loads with a large moment of inertia, a large size motor should be selected. When higher precision is required, it could be solved by adding gearbox, increasing the motor speed, or using subdivision driving. Also a 5-phase motor(unipolar motor) could be used, but the price of the entire system is relatively expensive, so it’s rarely used. Stepper motor size: We currently have 20mm(NEMA8), 28mm(NEMA11), 35mm(NEMA14), 42mm(NEMA17), 57mm(NEMA23), 86mm(NEMA34) hybrid stepper motors. We suggest to determine motor size first, then confirm other parameter, when you select a hybrid stepper motor. Due to high resolution of hybrid stepper motor’s (200 or 400 steps per revolution), they are widely used for applications requiring high precision, such as: 3D printing Industrial control(CNC, automatic milling machine, textile machinery) Computer peripherals Packing machine And other automatic systems requiring high precision control.
Due to high resolution of hybrid stepper motor’s (200 or 400 steps per revolution), they are widely used for applications requiring high precision, such as: 3D printing Industrial control(CNC, automatic milling machine, textile machinery) Computer peripherals Packing machine And other automatic systems requiring high precision control.
 1.Causes and solutions for increased load on stepper motors after long-term use Cause: In some cases, stepper motors can run normally for a long time, but after a period of time they will lose steps. In this case, the load on the stepper motor is likely to have changed. It may come from the wear of stepper motor bearings or from external influences. Solution. ①Verify that the external environment has not changed: Has the mechanism of the motor drive changed? ②Verify bearing wear: Use ball bearings instead of bushings to extend motor life. ③Verify that the ambient temperature has not changed. For micro motors, the effect of bearing grease viscosity is not negligible. Use grease that is suitable for the operating range. (e.g. grease may become viscous at extreme temperatures, or under prolonged use thereby increasing motor load) 2.Stepper motor heating causes ①The current set by the driver is larger than the rated current of the motor ②the speed of the motor is too fast ③the motor itself has a large inertia and positioning torque, so even medium-speed operation will be hot, but does not affect the life of the motor. The demagnetization point of the motor in 130-200 ℃, so the motor in 70-90 ℃ is a normal phenomenon, as long as less than 130 ℃ is generally no problem, if you really feel overheated, the drive current is set to about 70% of the rated motor current or motor speed to reduce some. 3.When the stepper motor is powered on, the motor shaft does not rotate how to do? There are several reasons why the motor does not rotate.: A.Overload blocking rotation B.whether the motor has been damaged C.whether the motor is offline D.whether the pulse signal CP to zero
1.Causes and solutions for increased load on stepper motors after long-term use Cause: In some cases, stepper motors can run normally for a long time, but after a period of time they will lose steps. In this case, the load on the stepper motor is likely to have changed. It may come from the wear of stepper motor bearings or from external influences. Solution. ①Verify that the external environment has not changed: Has the mechanism of the motor drive changed? ②Verify bearing wear: Use ball bearings instead of bushings to extend motor life. ③Verify that the ambient temperature has not changed. For micro motors, the effect of bearing grease viscosity is not negligible. Use grease that is suitable for the operating range. (e.g. grease may become viscous at extreme temperatures, or under prolonged use thereby increasing motor load) 2.Stepper motor heating causes ①The current set by the driver is larger than the rated current of the motor ②the speed of the motor is too fast ③the motor itself has a large inertia and positioning torque, so even medium-speed operation will be hot, but does not affect the life of the motor. The demagnetization point of the motor in 130-200 ℃, so the motor in 70-90 ℃ is a normal phenomenon, as long as less than 130 ℃ is generally no problem, if you really feel overheated, the drive current is set to about 70% of the rated motor current or motor speed to reduce some. 3.When the stepper motor is powered on, the motor shaft does not rotate how to do? There are several reasons why the motor does not rotate.: A.Overload blocking rotation B.whether the motor has been damaged C.whether the motor is offline D.whether the pulse signal CP to zero