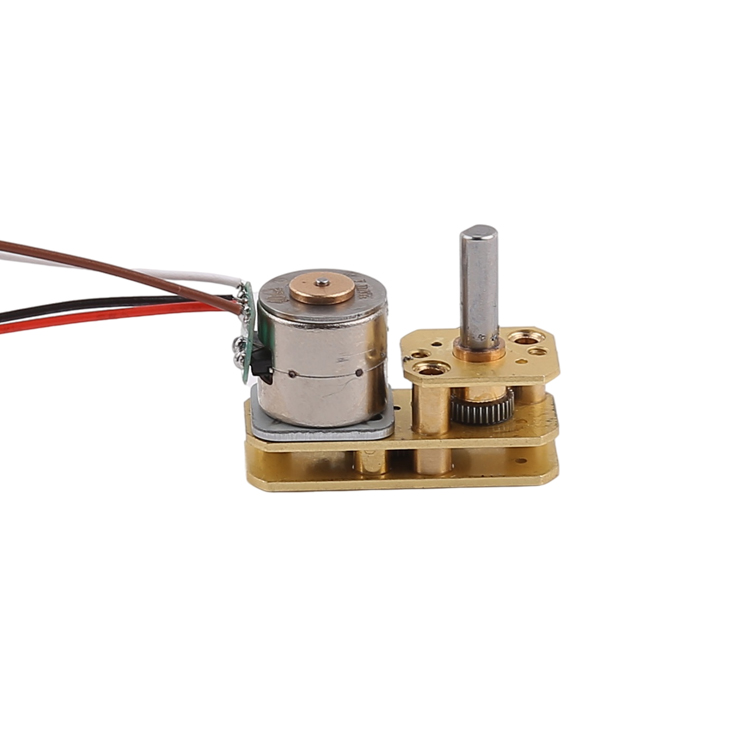
This motor is 8mm diameter stepper motor with planetary gearbox on top. There are two levels on the gearbox, gear ratio of first level is 4:1, and the gear ratio on the second level is 5:1, thus total ratio is 4*5=20:1 There is a flange in the middle for assembly. If customers think it takes too much of space, we could remove it for mass production in the future, and it does not affect motor’s parameters.This motor does not have output shaft, it has a blind hole instead. Customers can design a output shaft, with the end fits in the blind hole, and then insert it in.It would be equivalent as a regular output shaft.
Model No.
SM08PG
Motor diameter
8 mm
Drive voltage
5V DC
Coil resistance
14Ω±10%/phase
Number of phase
2 phases (bipolar)
Step angle
18 degrees/20
Gearbox type:
Planetary gearbox
Gear ratio
20:1
Geared stepper motors, widely used in Smart home, personal care, home appliance equipment, smart medical equipment, smart robot, smart logistics, smart cars, communication equipment, smart wearable devices, consumer electronics, camera equipment, and other industries.Lead time for samples: Standard motors in stock: within 3 days Standard motors not in stock: within 15 days Customized products: About 25~30 days (based on complexity of customization) Lead time for building a new mold: generally about 45 days Lead time for mass production: based on order quantity Packaging: Samples are packed in foam sponge with a paper box, shipped by express Mass production, motors are packed in corrugated cartons with transparent film outside. (shipping by air) If shipped by sea, product will be packed on palletsOn samples and air shipping, we use Fedex/TNT/UPS/DHL. (5~12 days for express service) For sea shipping, we use our shipping agent, and ship from Shanghai port. (45~70 days for sea shipping)1.The power input part of the standard stepper motor is available in the form of FPC, FFC, PCB cable, etc. 2.For output shaft, we have two different types of standard shafts:D shaft and screw shaft. If a special axis type is required, we can also customize it, but there is an additional customization cost. 3.8 mm diameter permanent magnet stepper motor with 10*8 mm gear box. The gear box has high precision, high efficiency and low noise, which makes the product have good reliability.1. Coil resistance/rated voltage: The coil resistance is adjustable, the higher the resistance, the higher the rated voltage of the motor. 2. Bracket design/slider length: If customers want longer or shorter bracket, there are special design, such as mounting holes, it is adjustable. 3. Slider design: the current slider is brass, it can be replaced with plastic to save cost 4. PCB+cable+connector: PCB design, cable length, connector pitch are adjustable, can be replaced with FPC according to customer's need.This planetary gearbox is specifically design drawing micro electronic products such as mobile phone, camera and other small sized products. It’s a 2 levels gearbox, and the gears and other components inside are made from Metal injection Molding technique (MIM technology). MIM technology use injection method to produce metallic parts, just like the way we product plastic with injection mold. It can produce high precision metal parts with small size and high precision, which is critical for a mini sized gearbox. But the equipment of MIM technology is expensive, thus the order quantity of it is higher. Otherwise the cost on each piece of product is too long. So minimum order quantity of MIM is higher, in order to lower average cost.1.Stepper motor how to use the curve exponential control speed? Exponential curve, in the software programming, first calculated time constants stored in the computer memory, work pointing to the selection. Usually, the acceleration and deceleration time to complete the stepper motor is 300ms or more. If you use too short acceleration and deceleration time, for the vast majority of stepper motors, it will be difficult to achieve high-speed rotation of stepper motors.2.What are the commonly fitted gearboxes for stepper motors? Stepper motors are assembled with reducers such as planetary reducers, worm gear reducers, parallel gear reducers, and filament gear reducers.







 Geared stepper motors, widely used in Smart home, personal care, home appliance equipment, smart medical equipment, smart robot, smart logistics, smart cars, communication equipment, smart wearable devices, consumer electronics, camera equipment, and other industries.Lead time for samples: Standard motors in stock: within 3 days Standard motors not in stock: within 15 days Customized products: About 25~30 days (based on complexity of customization) Lead time for building a new mold: generally about 45 days Lead time for mass production: based on order quantity Packaging: Samples are packed in foam sponge with a paper box, shipped by express Mass production, motors are packed in corrugated cartons with transparent film outside. (shipping by air) If shipped by sea, product will be packed on pallets
Geared stepper motors, widely used in Smart home, personal care, home appliance equipment, smart medical equipment, smart robot, smart logistics, smart cars, communication equipment, smart wearable devices, consumer electronics, camera equipment, and other industries.Lead time for samples: Standard motors in stock: within 3 days Standard motors not in stock: within 15 days Customized products: About 25~30 days (based on complexity of customization) Lead time for building a new mold: generally about 45 days Lead time for mass production: based on order quantity Packaging: Samples are packed in foam sponge with a paper box, shipped by express Mass production, motors are packed in corrugated cartons with transparent film outside. (shipping by air) If shipped by sea, product will be packed on pallets On samples and air shipping, we use Fedex/TNT/UPS/DHL. (5~12 days for express service) For sea shipping, we use our shipping agent, and ship from Shanghai port. (45~70 days for sea shipping)
On samples and air shipping, we use Fedex/TNT/UPS/DHL. (5~12 days for express service) For sea shipping, we use our shipping agent, and ship from Shanghai port. (45~70 days for sea shipping) 1.The power input part of the standard stepper motor is available in the form of FPC, FFC, PCB cable, etc. 2.For output shaft, we have two different types of standard shafts:D shaft and screw shaft. If a special axis type is required, we can also customize it, but there is an additional customization cost. 3.8 mm diameter permanent magnet stepper motor with 10*8 mm gear box. The gear box has high precision, high efficiency and low noise, which makes the product have good reliability.1. Coil resistance/rated voltage: The coil resistance is adjustable, the higher the resistance, the higher the rated voltage of the motor. 2. Bracket design/slider length: If customers want longer or shorter bracket, there are special design, such as mounting holes, it is adjustable. 3. Slider design: the current slider is brass, it can be replaced with plastic to save cost 4. PCB+cable+connector: PCB design, cable length, connector pitch are adjustable, can be replaced with FPC according to customer's need.
1.The power input part of the standard stepper motor is available in the form of FPC, FFC, PCB cable, etc. 2.For output shaft, we have two different types of standard shafts:D shaft and screw shaft. If a special axis type is required, we can also customize it, but there is an additional customization cost. 3.8 mm diameter permanent magnet stepper motor with 10*8 mm gear box. The gear box has high precision, high efficiency and low noise, which makes the product have good reliability.1. Coil resistance/rated voltage: The coil resistance is adjustable, the higher the resistance, the higher the rated voltage of the motor. 2. Bracket design/slider length: If customers want longer or shorter bracket, there are special design, such as mounting holes, it is adjustable. 3. Slider design: the current slider is brass, it can be replaced with plastic to save cost 4. PCB+cable+connector: PCB design, cable length, connector pitch are adjustable, can be replaced with FPC according to customer's need. This planetary gearbox is specifically design drawing micro electronic products such as mobile phone, camera and other small sized products. It’s a 2 levels gearbox, and the gears and other components inside are made from Metal injection Molding technique (MIM technology). MIM technology use injection method to produce metallic parts, just like the way we product plastic with injection mold. It can produce high precision metal parts with small size and high precision, which is critical for a mini sized gearbox. But the equipment of MIM technology is expensive, thus the order quantity of it is higher. Otherwise the cost on each piece of product is too long. So minimum order quantity of MIM is higher, in order to lower average cost.1.Stepper motor how to use the curve exponential control speed? Exponential curve, in the software programming, first calculated time constants stored in the computer memory, work pointing to the selection. Usually, the acceleration and deceleration time to complete the stepper motor is 300ms or more. If you use too short acceleration and deceleration time, for the vast majority of stepper motors, it will be difficult to achieve high-speed rotation of stepper motors. 2.What are the commonly fitted gearboxes for stepper motors? Stepper motors are assembled with reducers such as planetary reducers, worm gear reducers, parallel gear reducers, and filament gear reducers.
This planetary gearbox is specifically design drawing micro electronic products such as mobile phone, camera and other small sized products. It’s a 2 levels gearbox, and the gears and other components inside are made from Metal injection Molding technique (MIM technology). MIM technology use injection method to produce metallic parts, just like the way we product plastic with injection mold. It can produce high precision metal parts with small size and high precision, which is critical for a mini sized gearbox. But the equipment of MIM technology is expensive, thus the order quantity of it is higher. Otherwise the cost on each piece of product is too long. So minimum order quantity of MIM is higher, in order to lower average cost.1.Stepper motor how to use the curve exponential control speed? Exponential curve, in the software programming, first calculated time constants stored in the computer memory, work pointing to the selection. Usually, the acceleration and deceleration time to complete the stepper motor is 300ms or more. If you use too short acceleration and deceleration time, for the vast majority of stepper motors, it will be difficult to achieve high-speed rotation of stepper motors. 2.What are the commonly fitted gearboxes for stepper motors? Stepper motors are assembled with reducers such as planetary reducers, worm gear reducers, parallel gear reducers, and filament gear reducers.